Extrinsic Stereo/Camera Pair Calibration
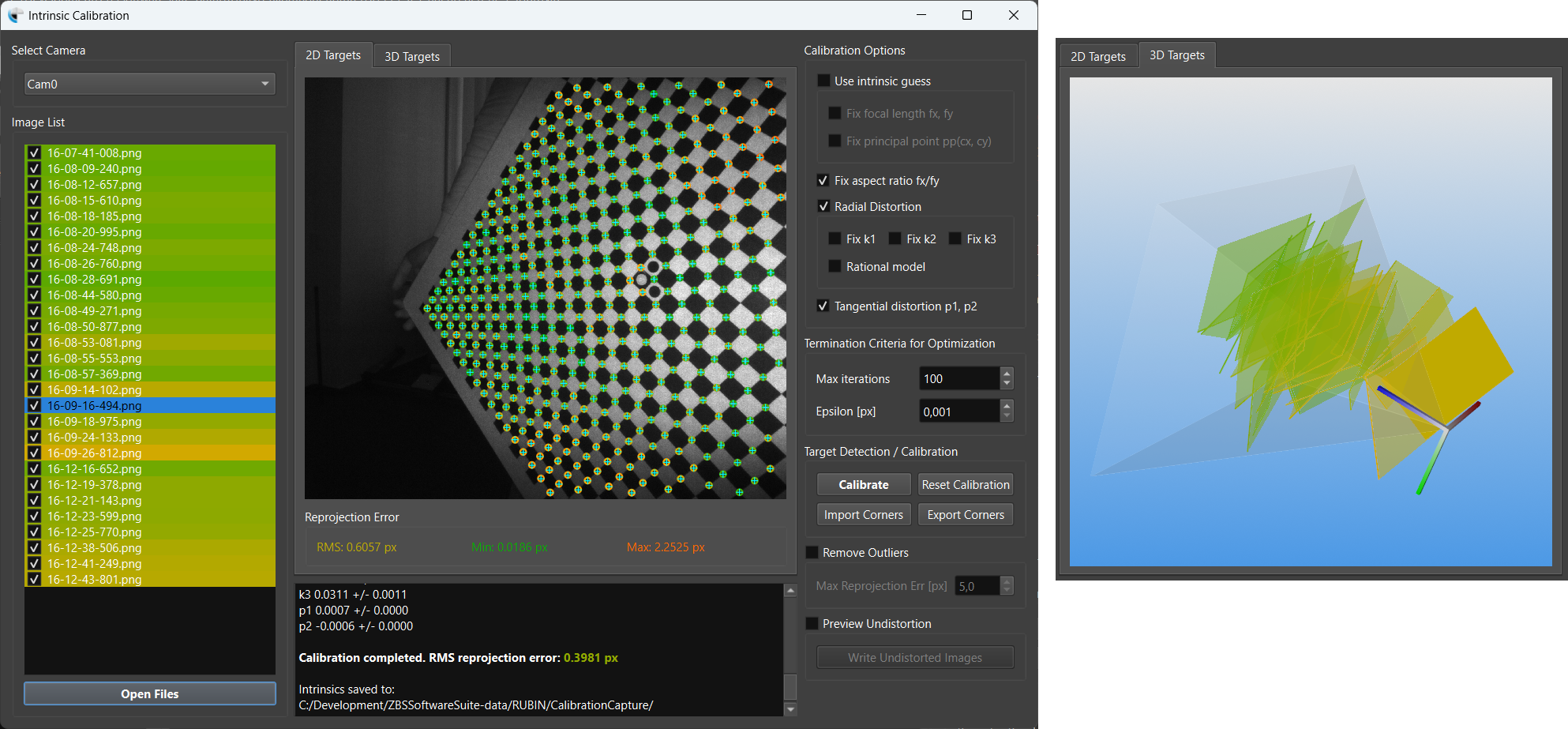
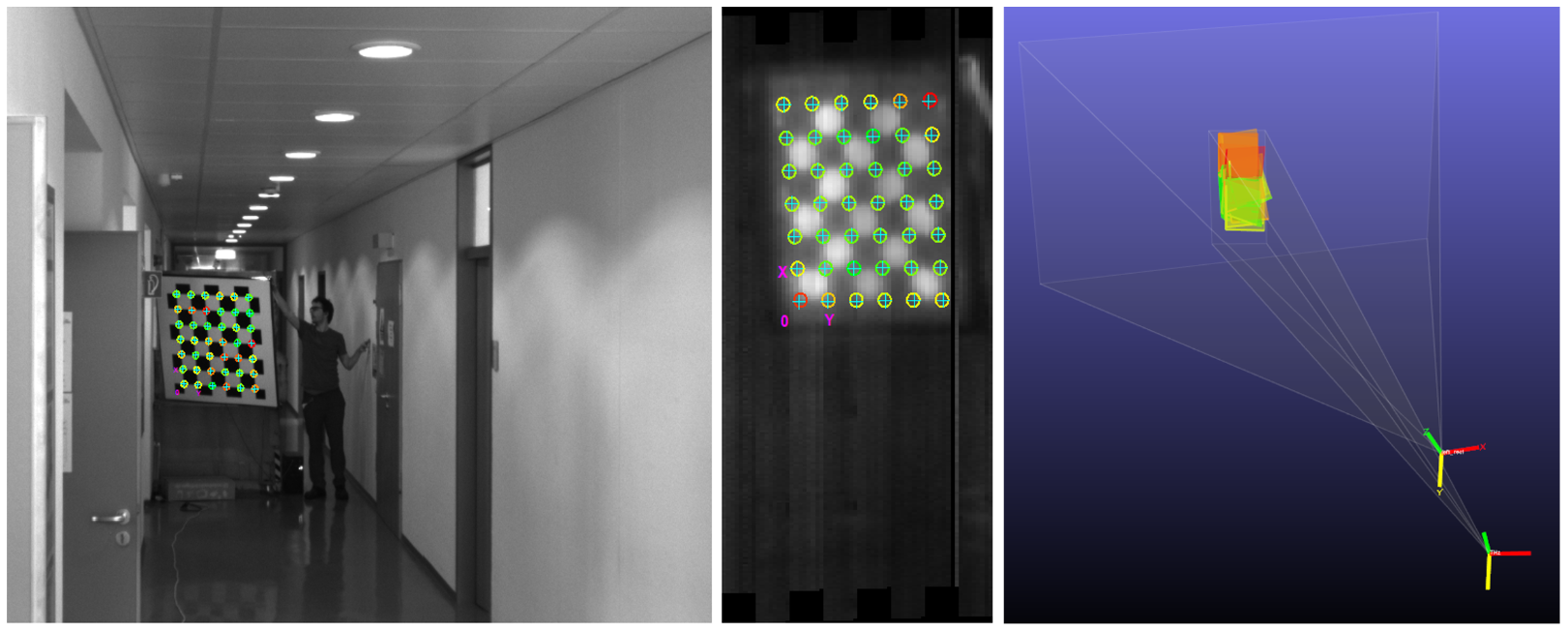
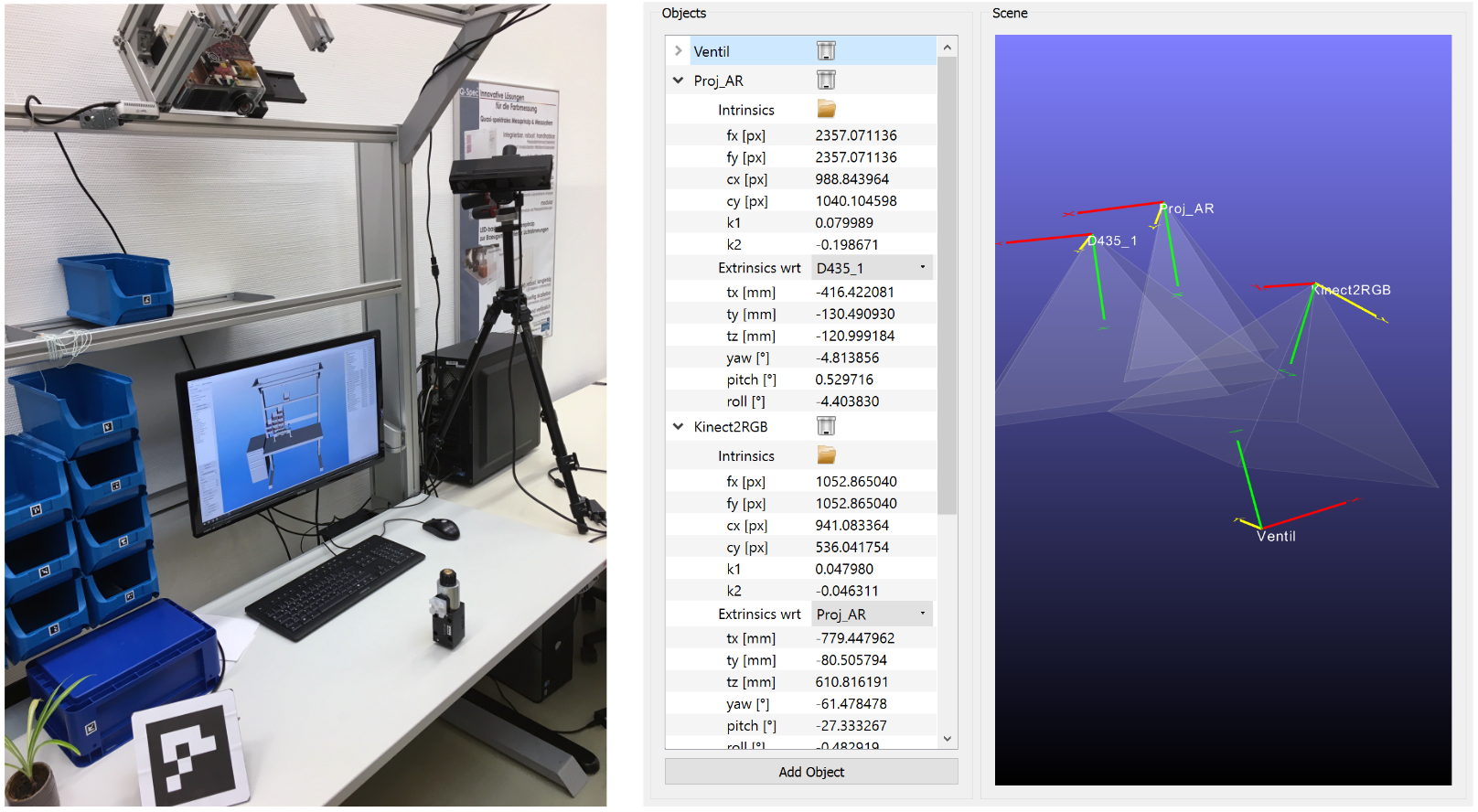
Extends the intrinsic calibration functionality to determine the relative position and orientation of two cameras with respect to each other. Target detection and calibration point extraction are again performed automatically for typical chessboard (with or without circular markers) or ChArUco* targets. Intrinsic parameters can either be estimated jointly during the extrinsic calibration process or provided manually.
Use cases: Depth sensing, 3D coordinate transformation, 3D-based sensor fusion
*Available from version 2.10.15. Existing licence holders receive a free upgrade for two years.