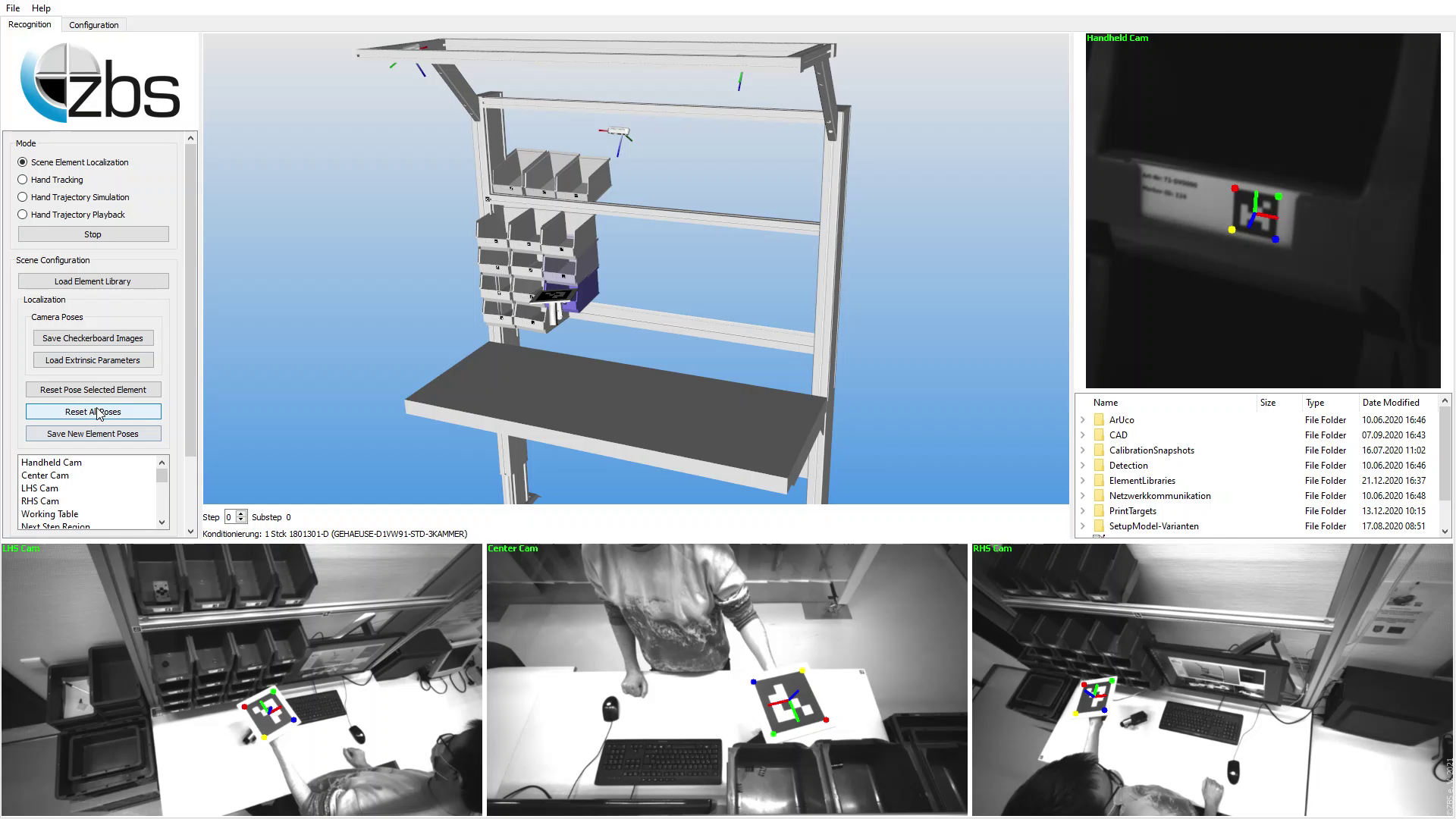
Der Einsatz von multimodalen Mehrkamerasystemen zur optischen Erfassung von 3D-Daten ist im Bereich der Robotik allgemein und der Mensch-Roboter-Kooperation weit verbreitet.
In diesen Anwendungen müssen 3D-Bildgebungen geometrisch kalibriert, erfasste 2D- und 3D-Sensordaten geometrisch zueinander registriert und fusioniert werden. Für die weitere Datennutzung ist es erforderlich, Elemente der Aufnahmeanordnungen und Szenenobjekte korrekt im Raum miteinander zu verorten.

Wir unterstützen Sie mit unserem Softwaretool 3D-EasyCalib bei den vielfältigen Aufgaben der geometrischen Kalibrierung und bieten dafür Kalibrierobjekte (Kalibriertargets) in standardisierten oder vielfältig individualisierbaren anwendungsspezifischen Umsetzungen
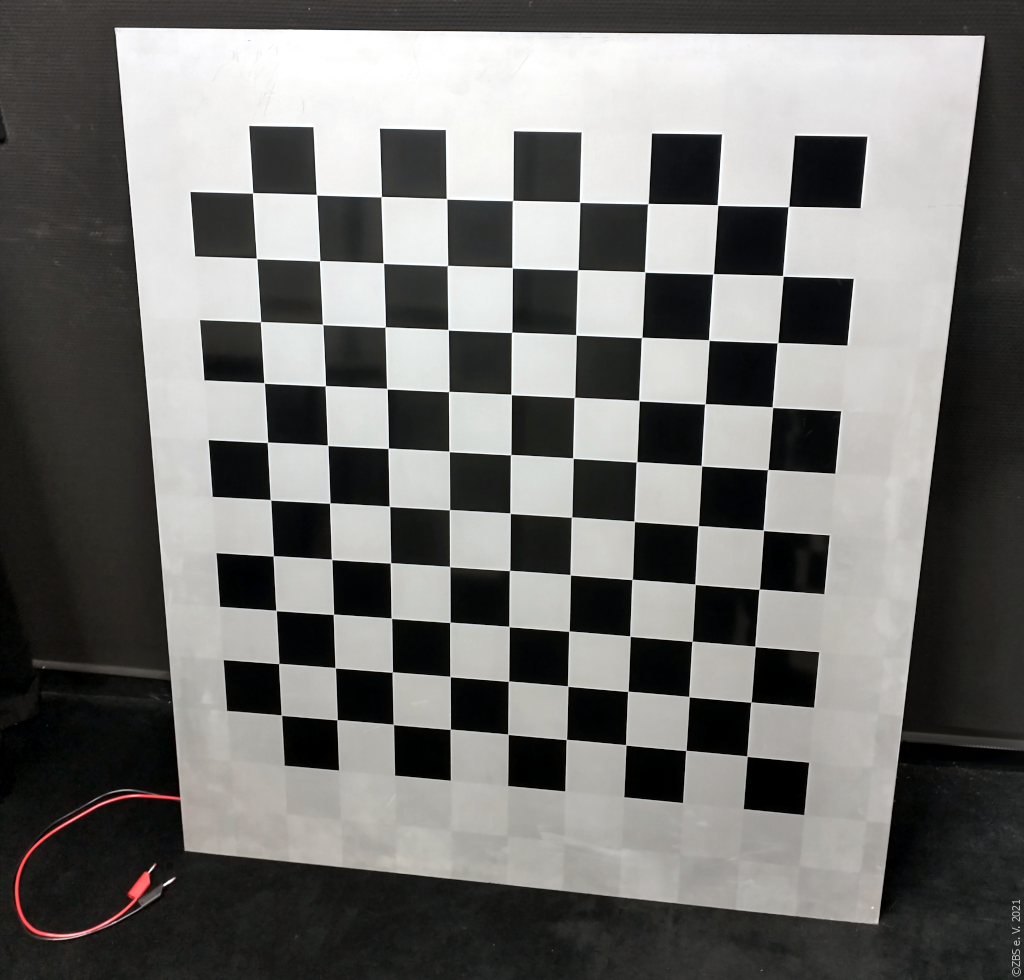
- unterschiedliche Basismaterialien (Alu, Alu-dibond, Glas, …)
- unterschiedliche Drucktechnologien (UV-Druck, Foliendruck)
und Farbgestaltung - individuelle Größen und Ausführungen
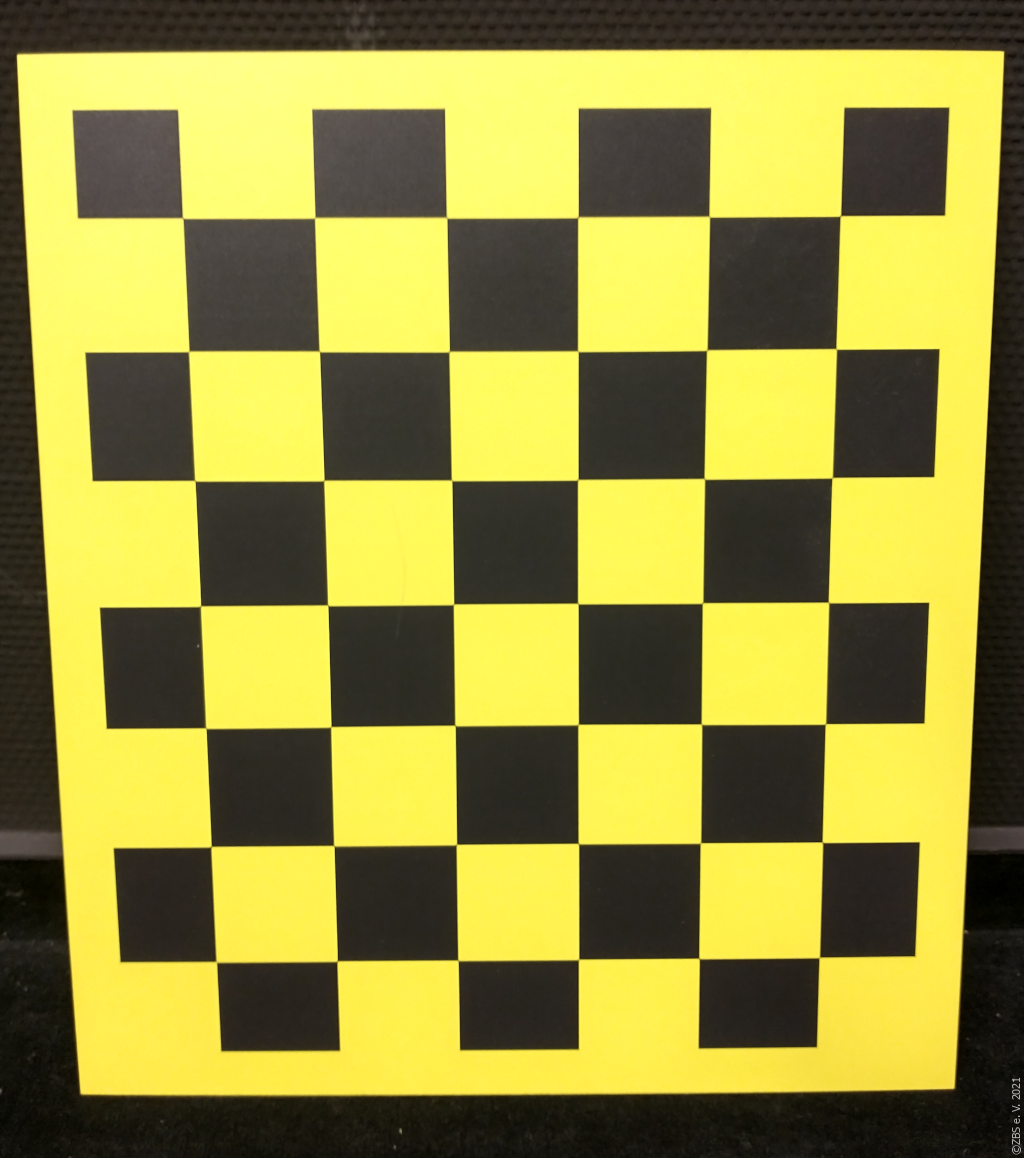
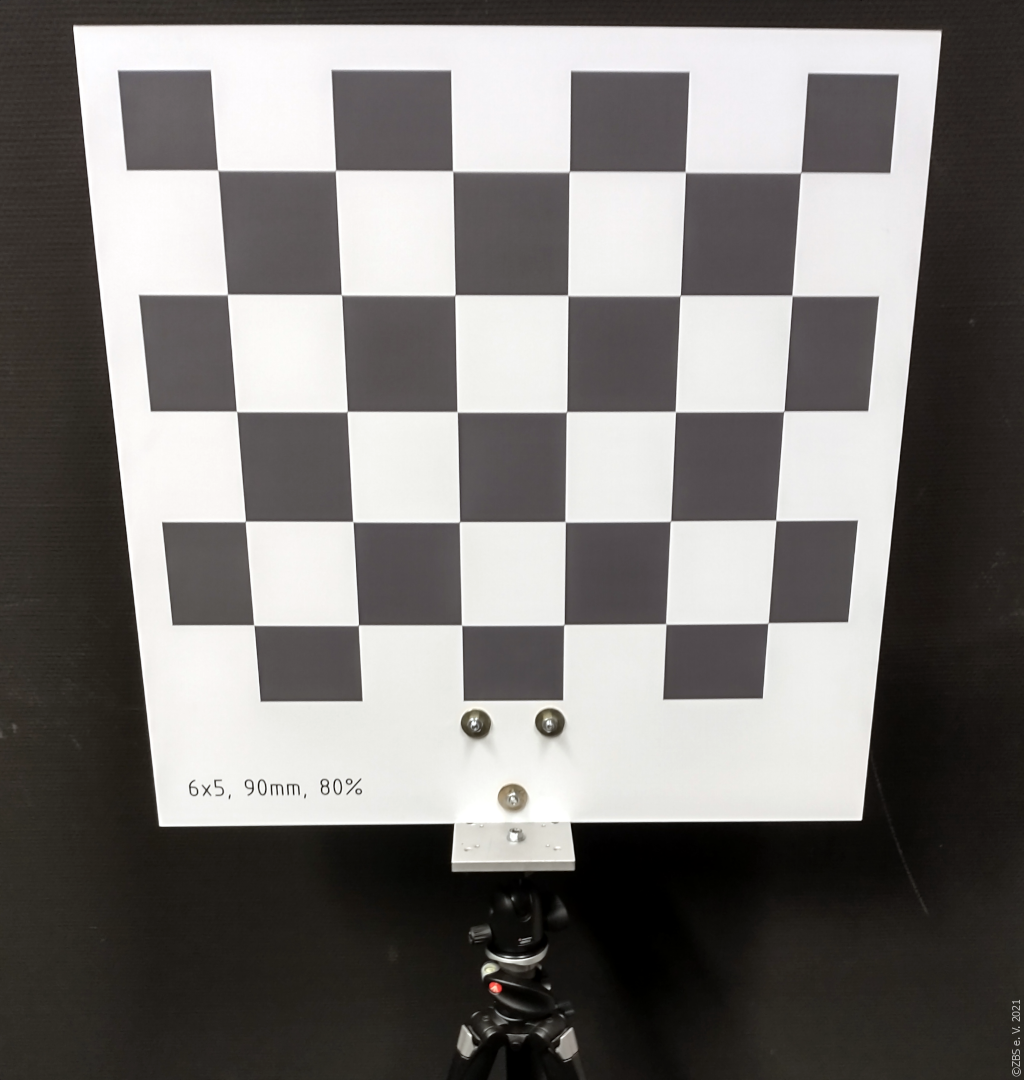
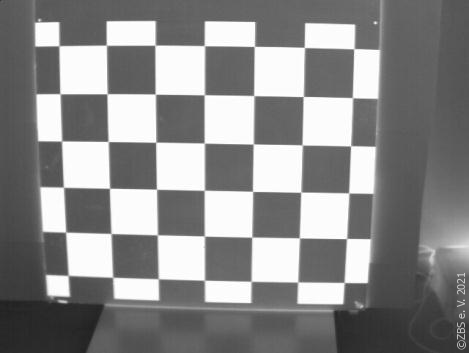
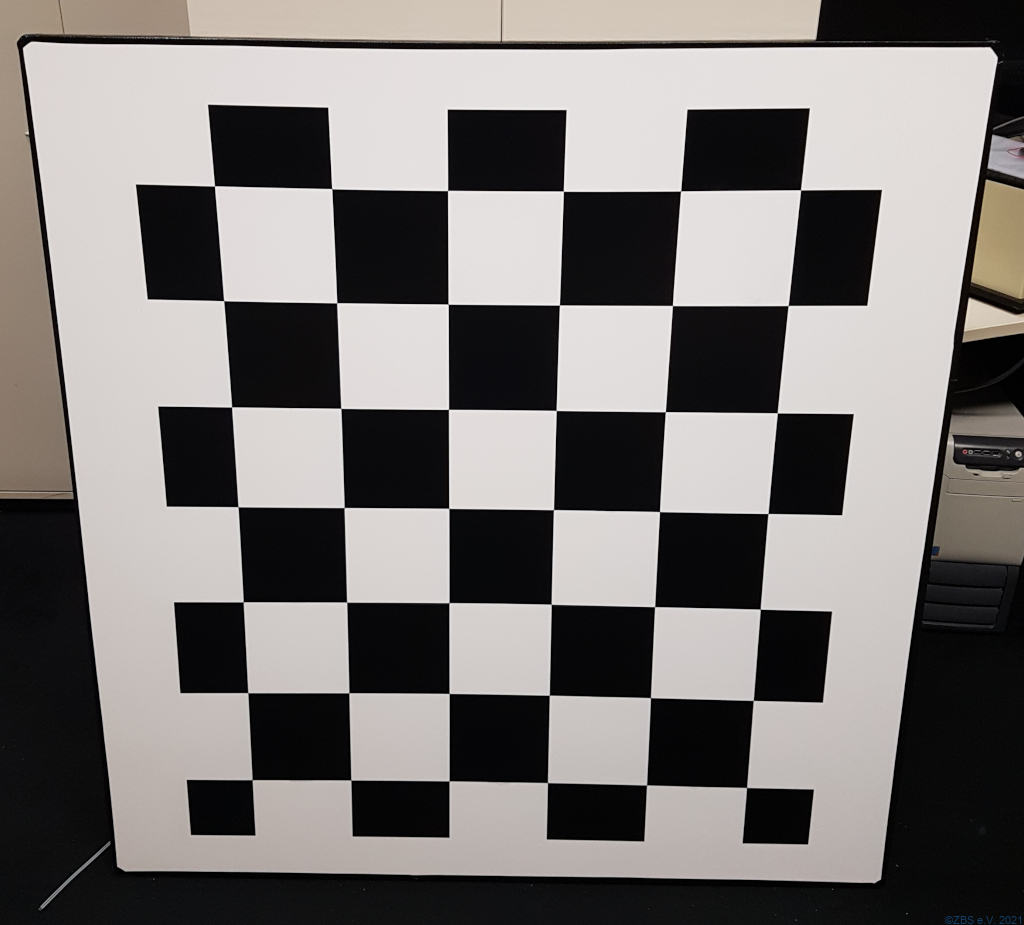
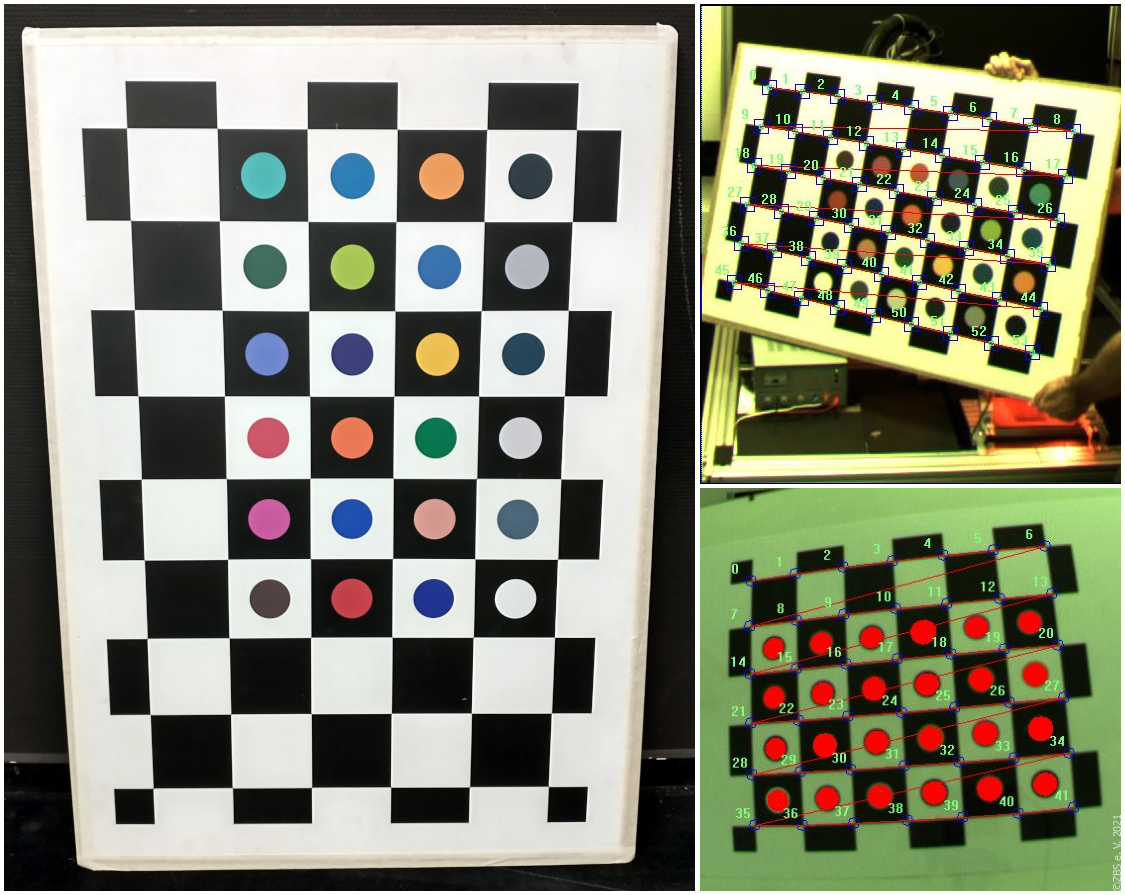
- individueller Musterkatalog (Schachbrett, ChArUco, Aruco, Radon, Kreise) oder eigene Muster
an. Selbstverständlich können Sie unsere Targetdesigns auch für eigene Auswertungen nutzen.
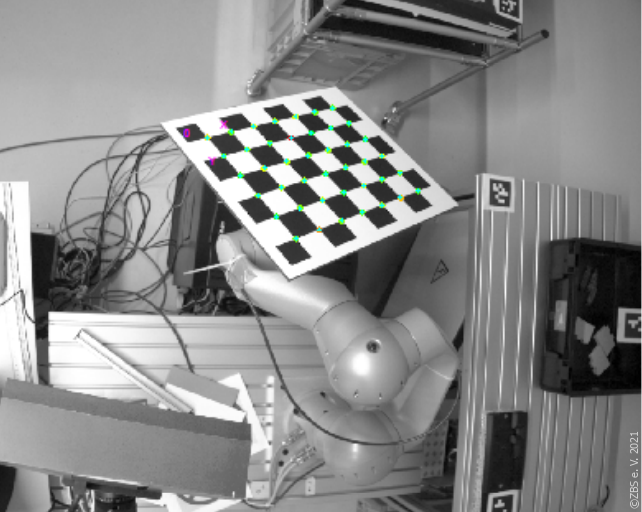
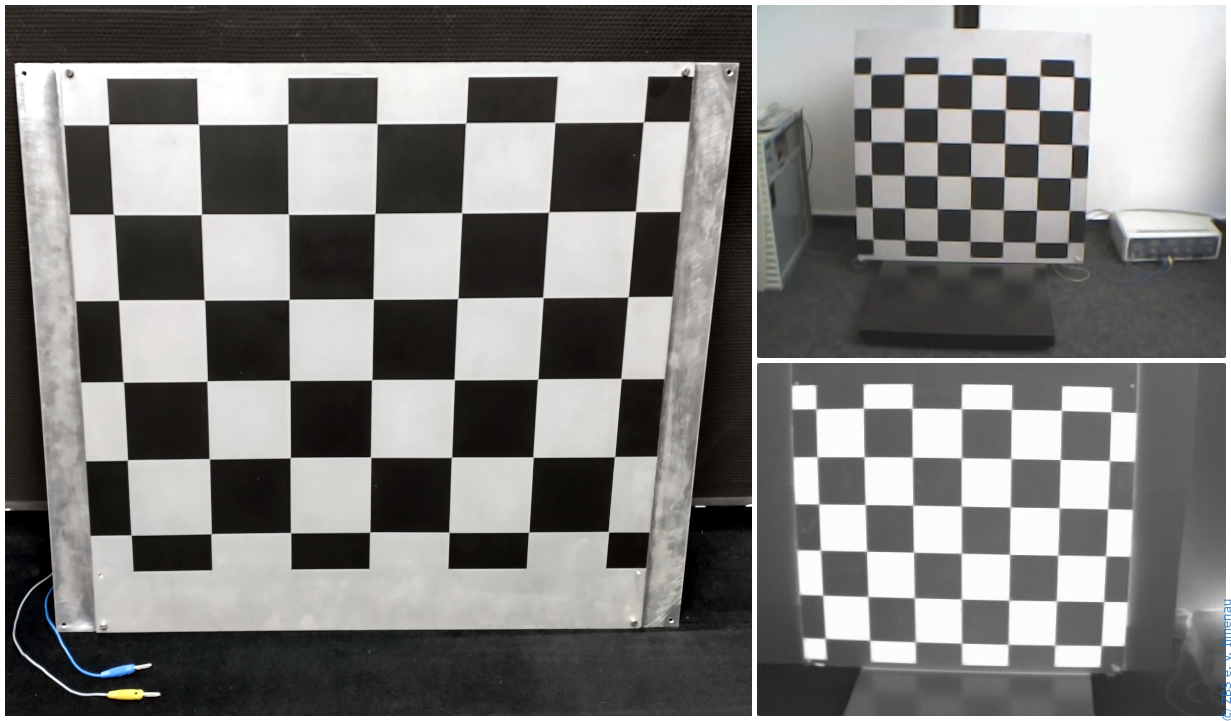
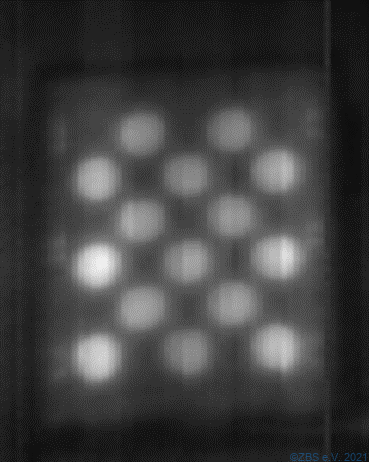
Wir unterstützen Sie bei der richtigen Targetgestaltung und greifen dabei auf langjährige Erfahrungen in diesem Wissensbereich zurück. Einige Beispiele und Referenzen zu eigenen Anwendungen der geometrischen Kalibrierung finden Sie nachfolgend auf dieser Seite.
Schauen Sie in unserem Zweck-Shop vorbei oder nutzen Sie unseren Targetkonfigurator.