Gesamtziel des Verbundprojekts „Modulares Assistenzsystem für die sichere 3D-Navigation und Mensch-Maschine-Interaktion von autonomen mobilen Robotern in Indoor- und Outdoor-Anwendungen“ ist ein auf mobilen Robotern und Automaten installierbares, modulares 3D-Assistenzsystem, das aus multimodalen, 3D-fähigen Sensorkomponenten, intelligenten Verarbeitungseinheiten und einer Kommunikationsinfrastruktur besteht und das die präzise Selbstlokalisation, kollisionssichere Navigation und Fähigkeiten zur Identifikation und Interaktion zwischen Mensch und Roboter verfügt.
Verbundprojekt innerhalb der Forschungsallianz 3D-Sensation mit den Projektpartern
MartinMechanic Friedrich Martin GmbH & Co. KG
LUCAS Jena GmbH
Fraunhofer-Institut für Angewandte Optik und Feinmechanik
Otto-von-Guericke Universität Magdeburg, Arbeitsgruppe Neuro-Informationstechnik
Das Teilprojekt „Komponenten zur sicheren 3D-Umfelderfassung und -Interaktion für mobile Roboter in dynamischen Indoor-Arbeitsräumen“ schafft wichtige Voraussetzungen zur Erweiterung und Qualifizierung mobiler autonomer Robotersysteme für Interaktionsaufgaben im Umfeld sowie für Docking-, Handling- und Bearbeitungsaufgaben im Nahfeld jeweils mit höchstmöglichem Sicherheitsanspruch. Gegenstand des Teilprojektes ist die schnelle, irritationsfreie 3D-Datenerfassung und -verarbeitung des weiteren Umfeldes einer mobilen Roboterplattform und darüber hinaus die Umsetzung von Interaktionsmodalitäten aus bzw. in diesem Raum. Die logistische Funktionalität, das heißt Verortung, Pfadplanung und einfache Kollisionsvermeidung vorhandener autonomer Roboterplattformen (FTS) soll durch die im Teilvorhaben entwickelten sensorischen Lösungen und Analysen des 3D-Umfeldes so ergänzt werden, dass auch in hochdynamischen (und variablen) Arbeitsräumen jederzeit und unter typischen industriellen Bedingungen höchstmögliche Sicherheit für Menschen und Objekte des Arbeitsprozesses (mobile und stationäre Roboter) gewährleistet werden kann. Darüber hinaus soll der Mensch bewusst, z.B. über Gesteninteraktion, in die automatischen Prozesse eingreifen können, indem er dem FTS einfache Handlungsanweisung gibt. Gleichzeitig erfasstes, nicht intendiertes Verhalten soll bei Erkennung und Klassifizierung von Gefahrensituationen die mobile Plattform geeignet beeinflussen.
Bezüge zu Produkten und Dienstleistungen des ZBS e. V.:
Für die nutzerfreundliche und schnelle Verortung der Kamerasysteme kam ZBS 3D-EasyCalib zum Einsatz.
Die Aufbereitung der Datensätze zum Einlernen der Personendetektion erfolgte mit ZBS EasyAnnotect.
Haben Sie Interesse an individueller Auftragsentwicklung in Verbindung mit Technologien zur sicheren Navigation mobiler Robotersysteme? Nehmen Sie Kontakt mit uns auf!
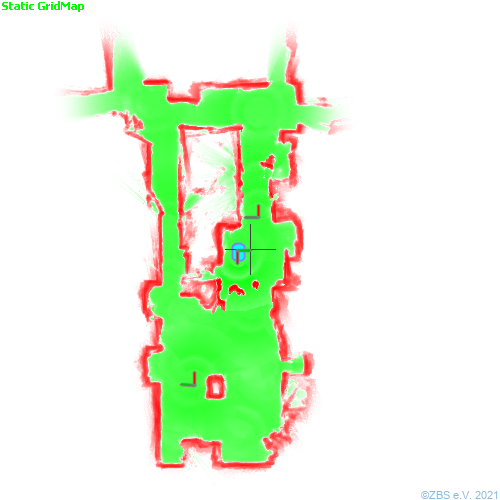
3D-Kamera-basierte GridMap für die kollisionssichere Navigation
ZBS-Personenerkennung
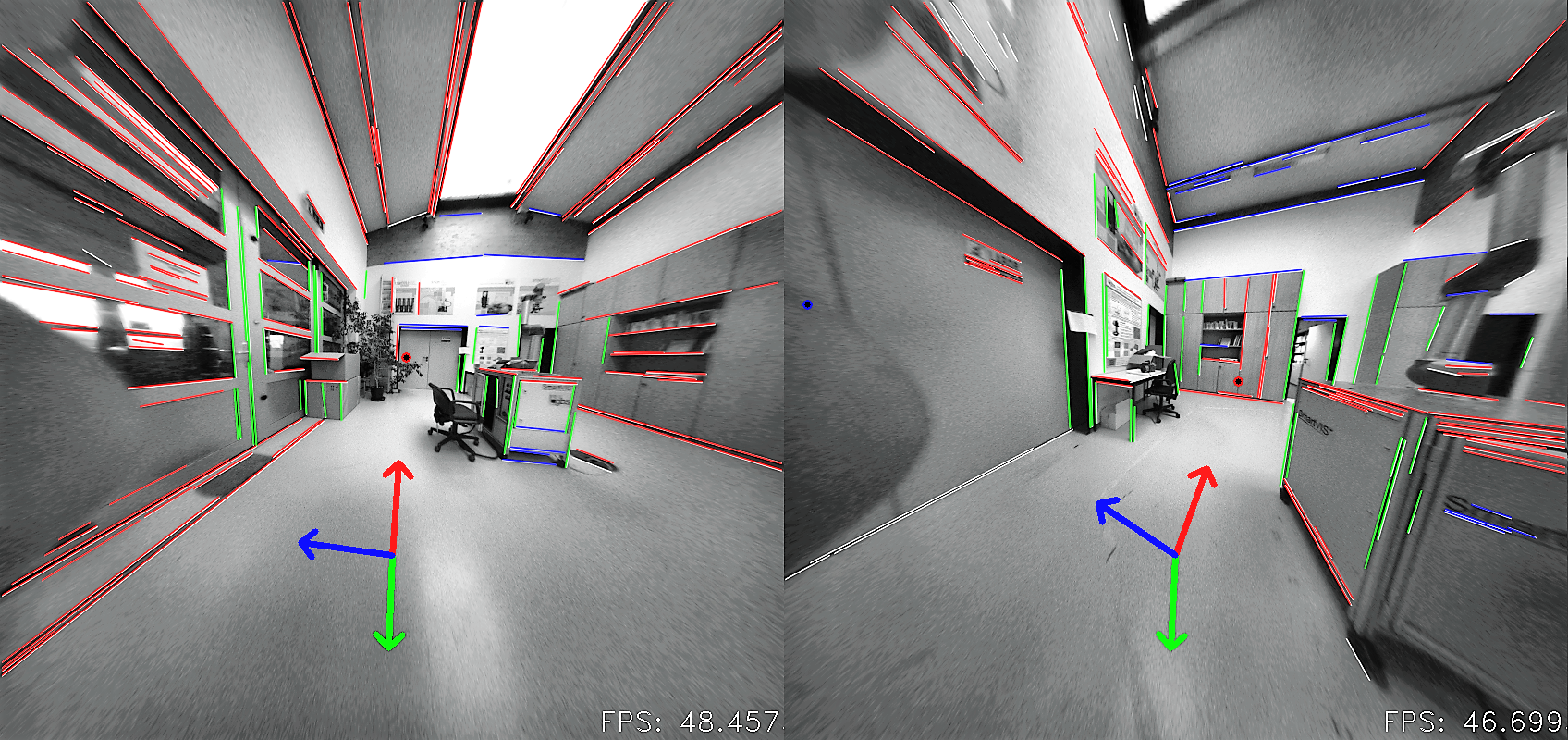
Manhattan-Welt-basierte Selbstlokalisation
Robustes Tracking der Kameraposition- und Orientierung in Manhattan-Welten
Kollisionsvermeidung durch Auswertung ergänzender 3D-Sensorik. Auf der rechten Seite ist die roboterinterne Kartierung zu sehen. Durch den Flächenscanner (LIDAR) können Hindernisse außerhalb der Scanebene (hier z.B. Tischplatte) nicht erkannt werden. Die SafeSurrounding-Applikation (linke Seite) wertet bildgebende 3D-Sensoren aus und ergänzt darauf basierend eine Kollisionserkennung. Die Applikation greif erst dann in die Robotersteuerung ein, wenn eine Kollision vorausgesehen anschließend, um den Roboter entlang eines Ausweichpfads zum Ziel zu führen.