Die Aufgabe des Projektes „Automatische Zustandsanalyse Kanalnetz durch virtuelle Begehung“ war es, in völlig neues Inspektionssystem für Abwasserkanäle auf der Basis optischer Messmethoden zu entwickeln. Das robotergestützte Messsystem soll 3D-Daten der Abwasserkanäle bereitstellen und diese automatisch auswerten, so dass Kanalbetreiber zukünftig auf dieser Datengrundlage eine valide, vollständige Übersicht zu Schäden des Kanalnetzes zum Monitoren und zur Sanierung erhalten.
Fraunhofer-Institut für Intelligente Analyse- und Informationssysteme
Fraunhofer-Institut für Optronik, Systemtechnik und Bildauswertung
Kappa optronics GmbH
JT-elektronik GmbH
Dr.-Ing. Pecher und Partner Ingenieurgesellschaft mbH
e.sigma Technology GmbH
Zentrum für Bild- & Signalverarbeitung e.V.
Teilprojekt 3D-BASEV
Die Aufgabenschwerpunkte des Teilprojektes „Algorithmen für die 3D-Datenextraktion und Beleuchtungssteuerung“ bestanden in der methodischen Aufbereitung und Konzeption eines neuen, 3D-fähigen Sensorkopfes unter Beachtung aller physikalischen, systemtheoretischen und systemtechnischen Aspekte. Dabei werden systemtheoretische Aspekte, Fragen der Optik, Beleuchtungstechnik sowie Algorithmen der sensornahen Bildvorverarbeitung (3D-Datenrekonstruktion) und der Fusion zu einer RGB-Textur-attributierten Kanalpunktwolke behandelt. Ein weiterer Schwerpunkt des ZBS-Teilprojektes widmete sich der tieferen Analyse klassifizierter Schadensbilder mit Methoden der 2D-Bildverarbeitung.
Wichtige Ergebnisse von 3D-BASEV sind nachfolgend dargestellt.
3D-Technik zur Kanalzustandserfassung
Sensorkopf
Konzeption, optischer Entwurf und Gestaltung von kompakten Kamera-Projektor-Modulen zur bildhaften 3D-/Textur-Erfassung nutzbar für Rohre DN200 bisDN400
Konzeption und Gestaltung von Messkopfverbündenzur3D-Rundumerfassung der Kanalinnenwand Umsetzung in AUZUKAalsspiralförmigeAnordnung
Bereitstellung von 3D-/Textur-Daten mit hoherzeitlicherVerfügbarkeit und hohergeometrischerGenauigkeit
Sensordatenverarbeitung
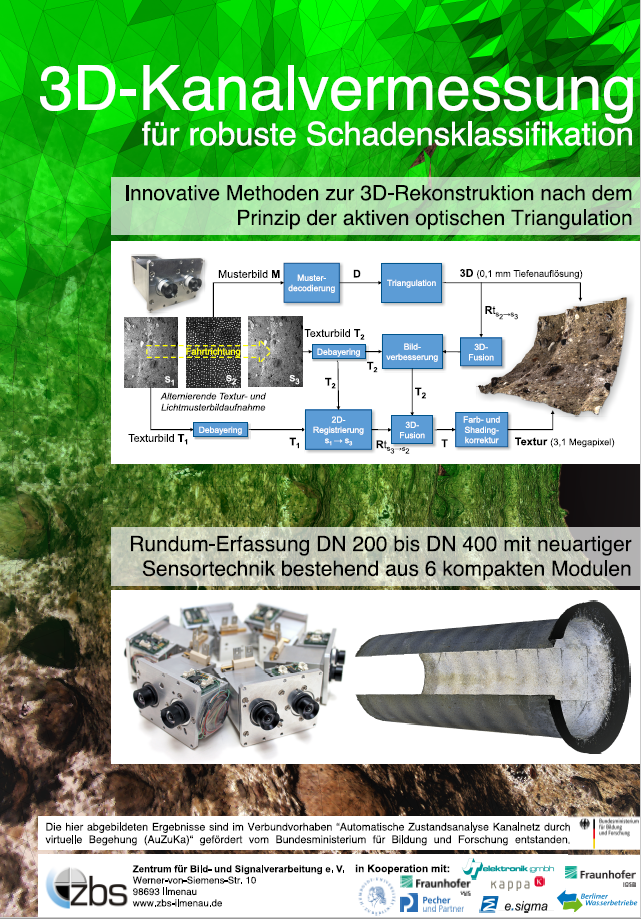
Innovative aktive 3D-Erfassung mit räumlicher Musterkodierung und optischer Triangulation (Single-Shot–3D) Ergänzende passive 3D-Erfassung aus Bewegung
Multimodale Fusionvon farbtreuen Textur- und hochauflösenden 3D-BilddatenausEinzelsensormodulen und Modulverbünden 19 Megapixel primärer Farb- und Textur-Daten pro zusammengesetzter Rundumerfassung für Schadenserkennung
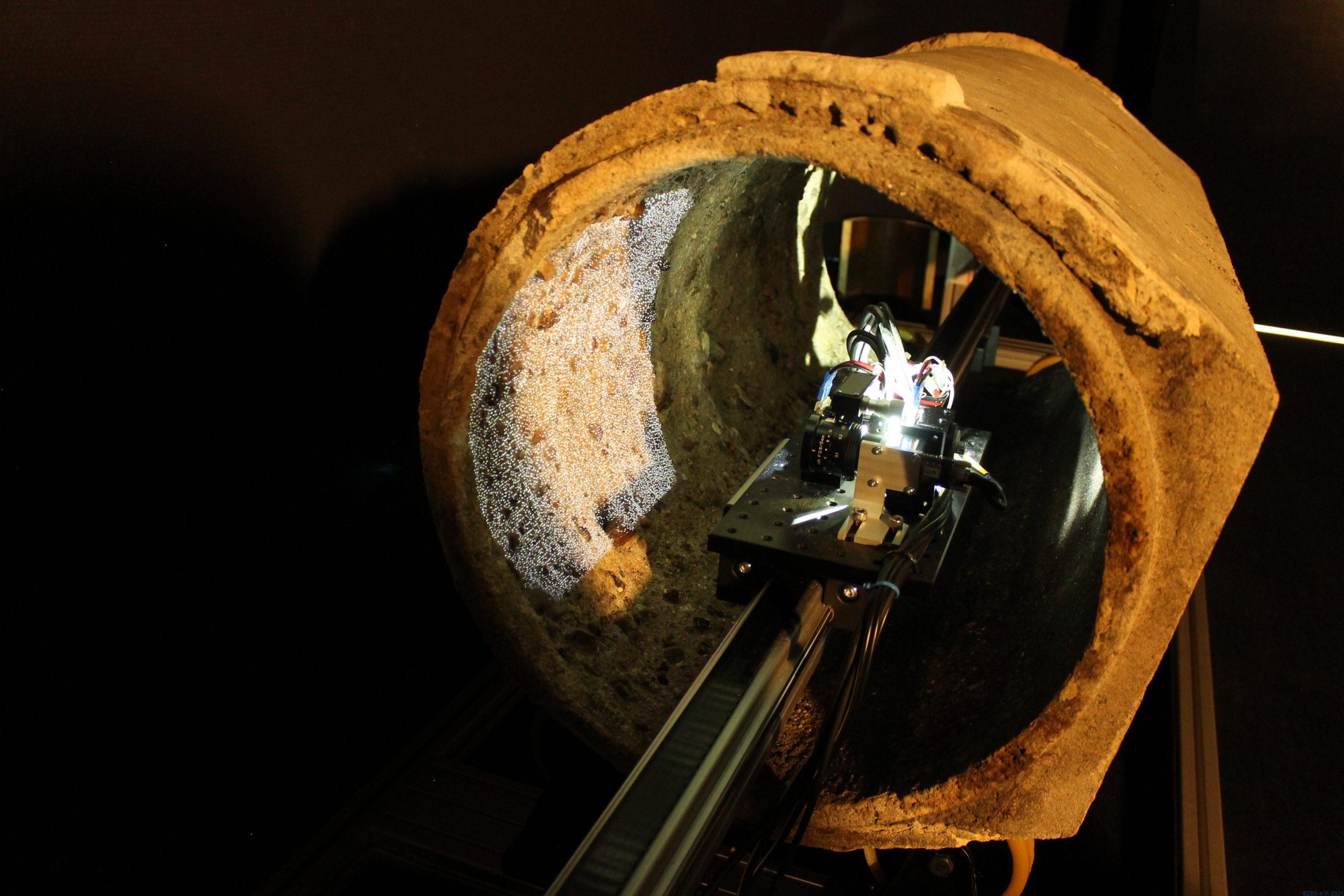
Laboraufbau der Sensortechnik am ZBS e.V.
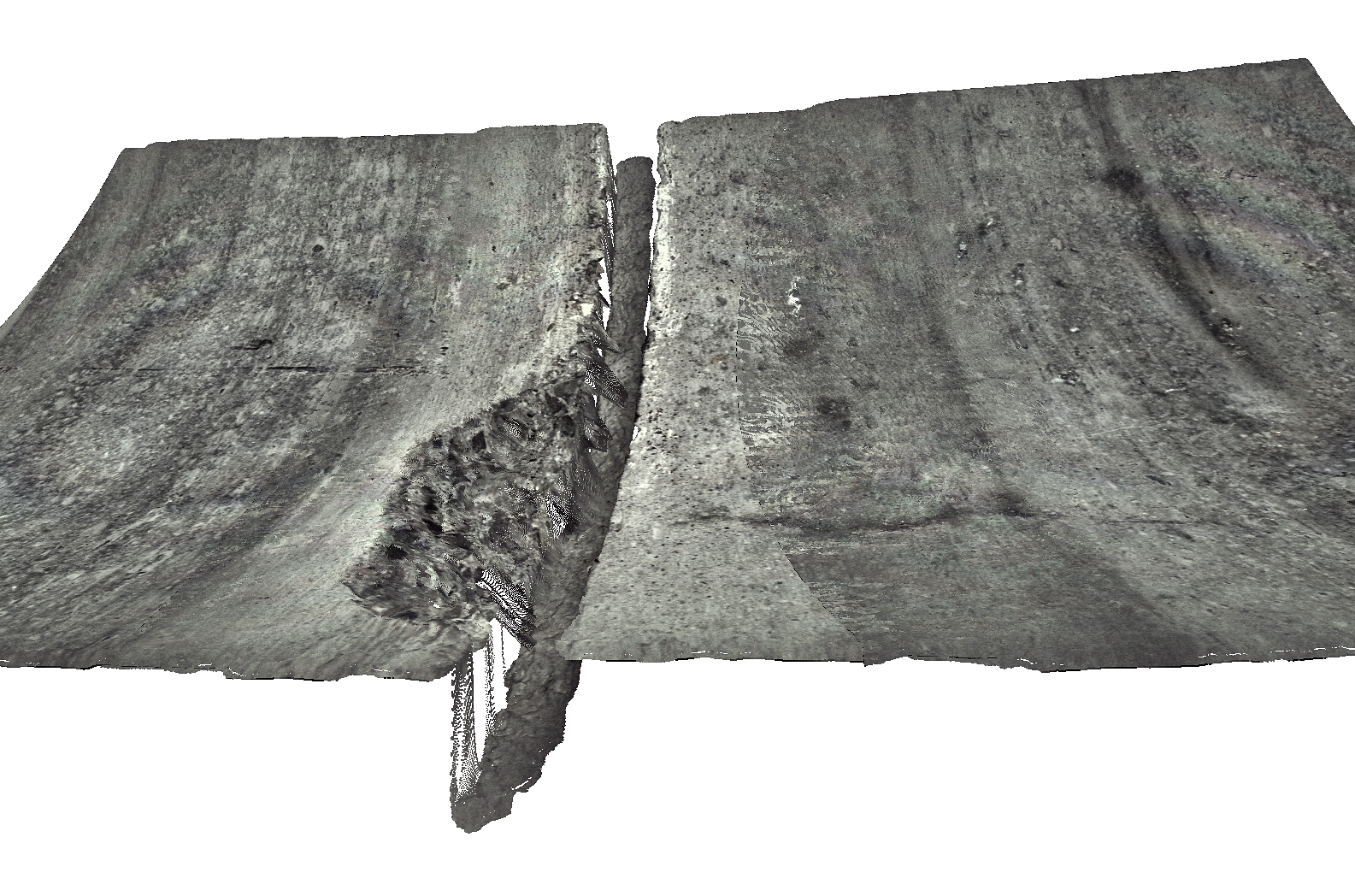
Bruch an der Verbindung
Übergang Kunstoff zu Beton
Übergang vom Beton zu Kunststoff
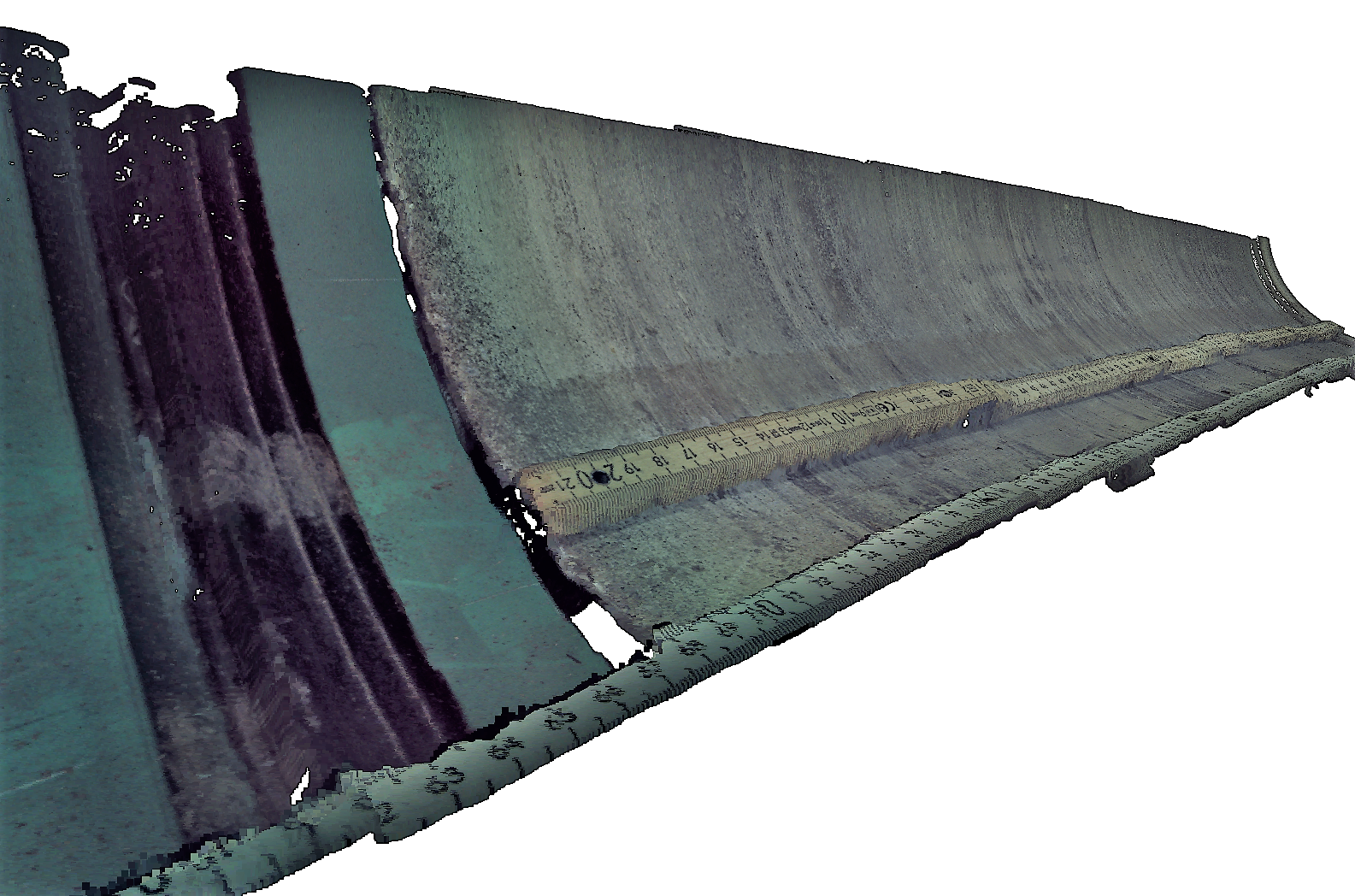
Muffe zwischen zwei Betonrohren, Zollstock und Maßband
DN400 Beton
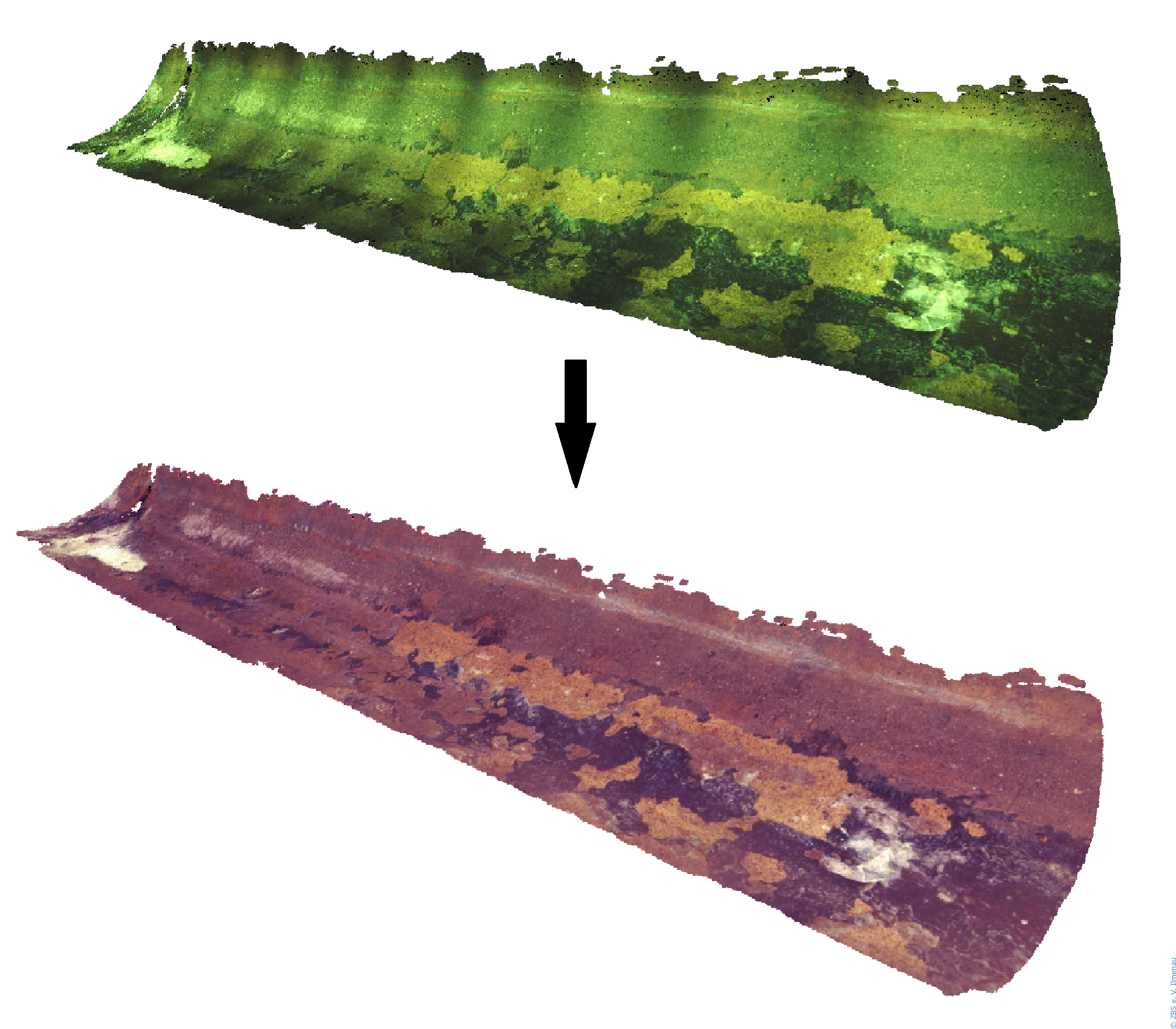
Radiometrische Korrektur der Texturaufnahmen
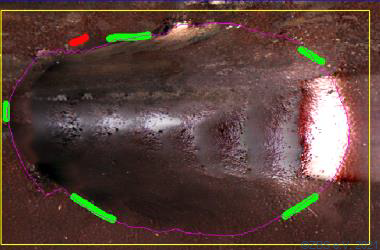
Vermessung von Objekt- und Schadensausmaßen
Automatische, wissensbasierte Analyse von Kanalschäden:
Für Charakterisierung und Quantifizierung der Schäden nach DIN-EN 13508 als Grundlage für Sanierungsmaßnahmen
Quantifizierte, schadensspezifische Bestimmung von Schadensausmaßen
Umgesetzt für ausgewählte Schadenstypen, Risse, Brüche und Rohranschlüsse
Funktionalität in vielfältigen SW-Umgebungen (Stand-Alone, Library) nutzbar
Eingabe: Bildausschnitt mit dem Schaden, optionale Nutzerinteraktion durch Markierung
Ausgabe: Kontur und Schadensmerkmale: Fläche, Umfang, Breite, Höhe, Orientierung, …
Schadensklasse Riss
Schadensklasse Bruch
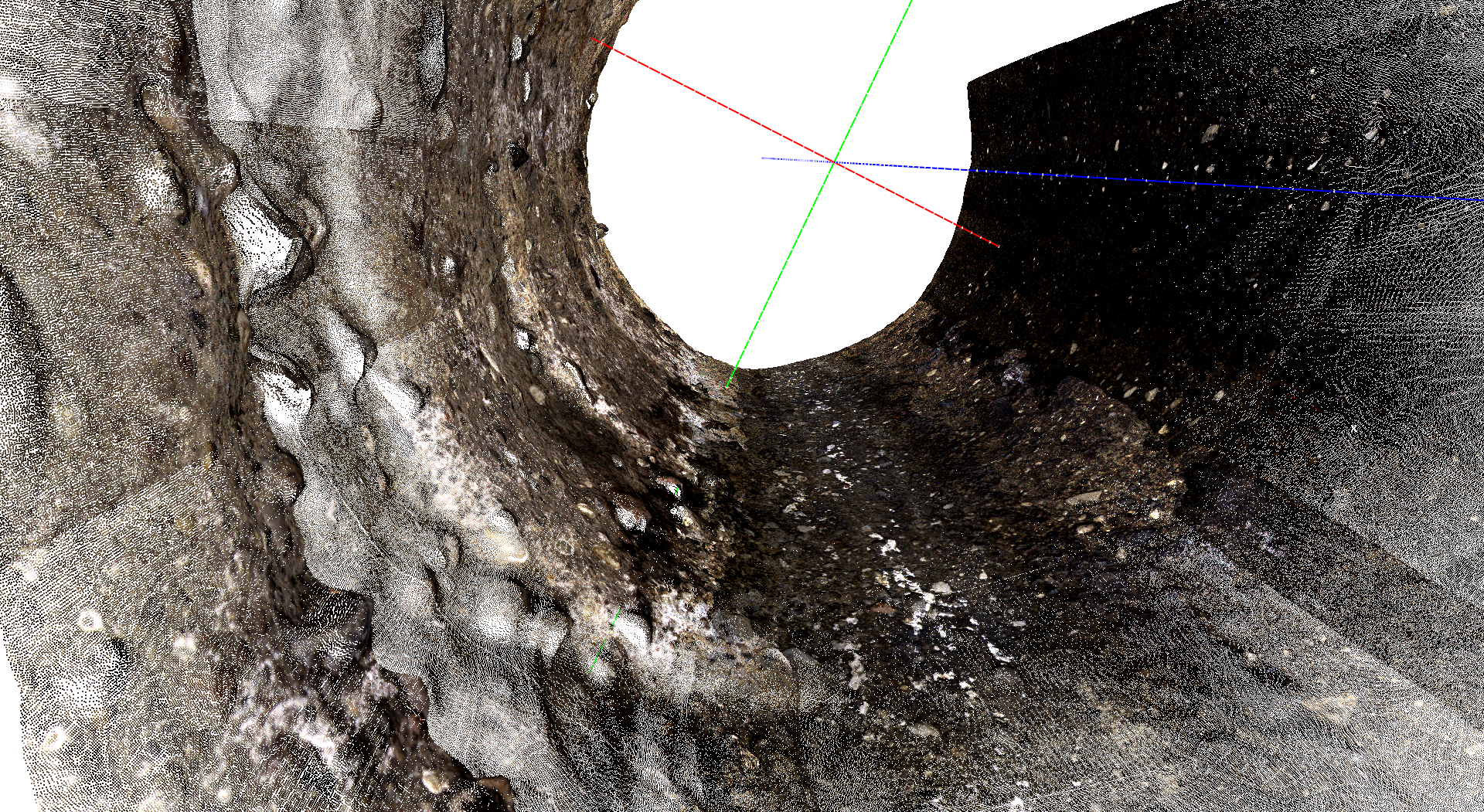
Objektklasse Rohranschluss
Veröffentlichungen
Daniel Kapusi, Rainer Jahn, Rico Nestler und Karl-Heinz Franke: „Farb- und Shadingkorrektur im speziellen Einsatzfeld der automatischen Kanalinspektion“; in Tagungsband zum 24. Workshop Farbbildverarbeitung, GfaI e.V. Berlin, Oktober 2019, GFaI e.V. (Hrsg.), S.99-110, ISBN 978-3-942709-23-1
Daniel Kapusi, Karl-Heinz Franke, Jens Eisert, Johannes Künzel, Florian Zimmermann, Jan Waschnewski: „In den Tiefen Berlins – Assistenzsysteme zur Bewertung des Abwasserkanalsystems – Perspektiven durch BV und maschinelles Lernen in der Bildauswertung“ Inspect 01/2019, Wiley-VCH Verlag GmbH & Co. KGaA
Daniel Kapusi, Darko Vehar, Rainer Jahn, Rico Nestler, Karl-Heinz Franke: „Multimodale Erfassung von Arbeitsräumen am Beispiel texturierter 3D-Innenrohroberflächen für die Kanalinspektion“ 22. Anwendungsbezogener Workshop zur Erfassung, Modellierung, Verarbeitung und Auswertung von 3D-Daten „3D-NordOst“, GFaI Gesellschaft zur Förderung angewandter Informatik e. V. Berlin, S. 79 ff., ISBN: 978-3-942709-24-8; Dezember 2019
J. Künzel, D. Vehar, R. Nestler, K.-H. Franke, A. Hilsmann und P. Eisert: „System for 3D Acquisition and 3D Reconstruction using Structured Light for Sewer Line Inspection“, 18th International Conference on Computer Vision Theory and Applications (VISAPP), Lisbon, Portugal 2023