AutoKoWaT - Innovative Photonik für Automatische Kollaborative Systeme in dynamischen Waren-Transportprozessen
Projektlaufzeit: September 2022 – Dezember 2025
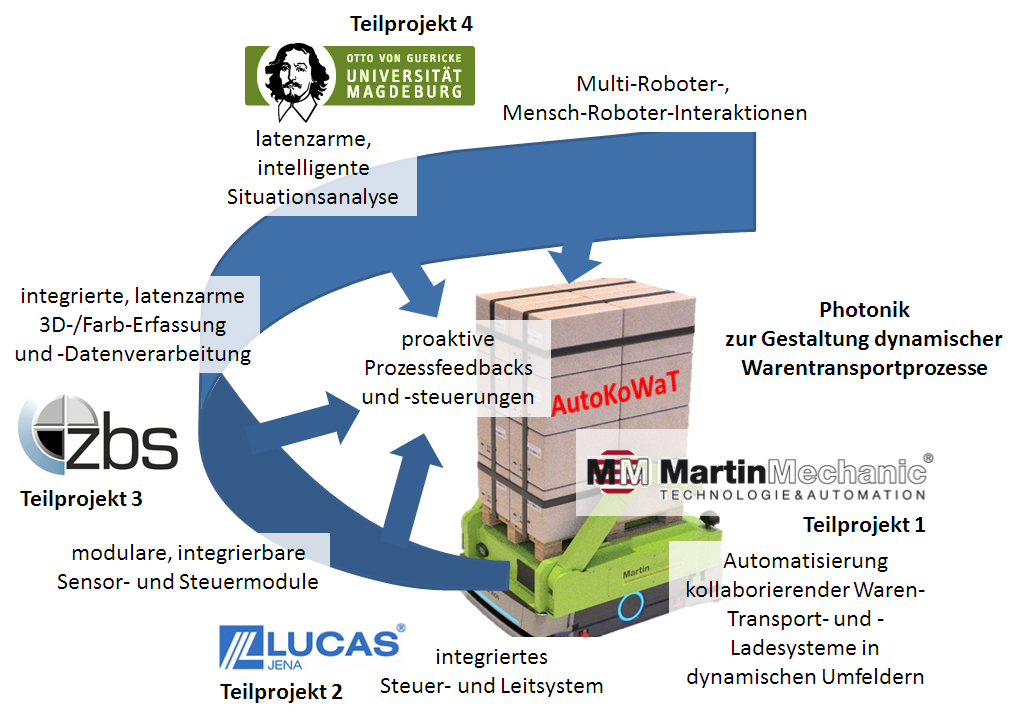
Im Vorhaben AutoKoWaT sollen selbstfahrende Transportsysteme durch zusätzliche photonische Komponenten, zuvorderst Sensoren und Künstliche Intelligenz, in die Lage versetzt werden, in komplexen, dynamischen Situationen allein oder im Schwarm vielfältige Logistikaufgaben zu lösen. Die innovative Sensorik soll den Arbeitsraum 3D-multimodal bildgebend, vorausschauend und dynamisch robust erfassen. Aus den Daten werden relevante Arbeitsraumobjekte identifiziert, verortet, semantisch analysiert und passende Handlungen abgeleitet. Zur Gewährleistung geringster Systemlatenzen sind die optimierte Gestaltung der photonischen Komponenten sowie deren Zusammenspiel mit Mechanismen der gegenseitigen Steuerung Entwicklungsziel. Für das Zusammenwirken von Photonik und Robotik werden Komponenten für ein Leit- und Steuersystem entwickelt.
Weitere Informationen zum Verbundprojekt finden Sie auf der Projektseite.
Das Teilprojekt SINGLESHOTDYNAMO
Die spezielle Aufgabe des Teilvorhabens SINGLESHOTDYNAMO des ZBS besteht in der Entwicklung eines aktiven photonischen Systems, das bildhafte 3D- und Farbtextur-Daten von einem hinreichend großen Aktionsraum erfasst, punktgenau zusammenführt, ersten Verarbeitungsschritten unterzieht und zur weiteren Verarbeitung in Echtzeit zur Verfügung stellt. Eine weitere wichtige Aufgabe der sensornahen Datenverarbeitung ist die Ableitung abstrahierender Szenenbeschreibungen und von Steuerdaten für die nachgelagerten Schritte der höheren kontextbezogenen Bilddatenanalyse oder zur Rückkopplung in die Robotersteuerung.
Funktionsmuster der im Vorhaben umgesetzten integrierten multimodalen Echtzeit-Bildgebung mit sensornahen Verarbeitungs- und Kommunikationsfähigkeiten
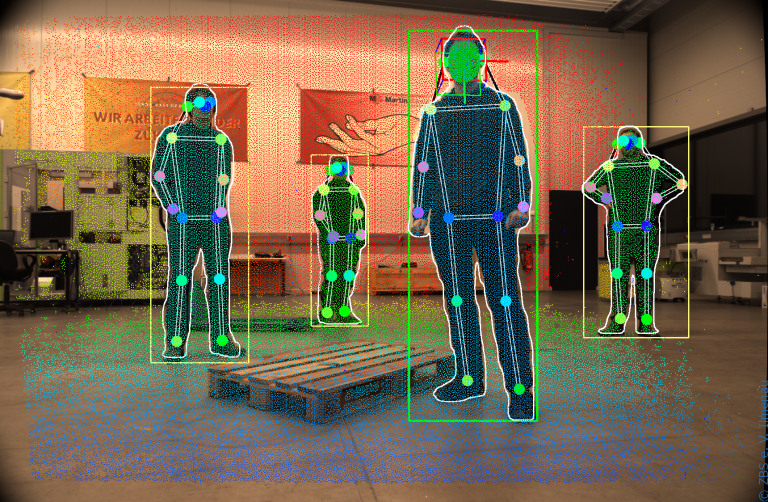
Sensornahe höhere Auswertung von Logistikszenen zur Absicherung der Prozesse und zur Unterstützung der Interaktionsfähigkeiten
Ergebnisse des Vorhabens im Video
David Reese; Evgeny Degtyarev; Rico Nestler:Accurate Projector-Camera-Calibration from Structured Light Dot Patterns via Subpixel Plane Reconstruction. In Anwendungsbezogener Workshop „3D in Science & Applications“ (3D-iSA), Tagungsband, GFaI e. V. Berlin, S. 96-101, ISBN: 978-3-942709-37-8, 2025.
Darko Vehar; Andreas Hermerschmidt; Rico Nestler; Karl-Heinz Franke:Single-shot structured light with diffractive optic elements for real-time 3D imaging for collaborative logistic scenarios, Proc. SPIE 12624, Digital Optical Technologies 2023, 126240V (7 August 2023). https://doi.org/10.1117/12.2675818