Gesamtziel des Verbundvorhabens „Bildbasiertes Überwachungssystem für die Bewegungssteuerung von Robotern im sicheren Arbeitsprozess mit Menschen – Mensch-Maschine-Kooperation“ bestand in der Entwicklung von Komponenten eines Sicherheitssystems für die Überwachung von Arbeitsräumen in denen Menschen und Maschinen interagieren. Der Aktionsraum Mensch-Maschine sollte vollständig und permanent in erster Linie visuell überwacht werden. Vorrausschauend sollten mögliche Gefahrensituationen erkannt und gegebenen falls geeignete Sicherheitsmaßnahmen eingeleitet werden, z. B. die eine Korrektur der Bahnkurve des Roboters (Ausweichbewegung), Verlangsamung des Roboters bis hin zum Not-Halt.
Die Hauptkomponenten des Überwachungssystems gliedern sich in die Bilderfassungssysteme, die den Kooperationsraum (Mensch-Maschine) in 2D bzw. 3D abbilden, in die komplexe Informationsverarbeitung und in das Sicherheitskonzept, das die Klassifikation von Kollisionsszenarien zur Realisierung einer angemessenen Sicherheit beinhaltet.
Partner im Verbundprojekt waren
Vision & Control GmbH
Fraunhofer Institut für Digitale Medientechnologie
CiS Institut für Mikrosensorik GmbH
ABS Gesellschaft für Automatisierung, Bildverarbeitung und Software mbH
solvimus GmbH
AVT GmbH Ilmenau Automatisierungs- und Verfahrenstechnik
ICOM Automation GmbH
JENTECH engineering GmbH
Zentrum für Bild- & Signalverarbeitung e.V.
Gefördert vom Freistaat Thüringen und kofinanziert aus Mitteln des Europäischen Fonds für Regionale Entwicklung
3D-Positionserfassung
in der Mensch-Maschine-Kooperation
Das Zentrum für Bild- und Signalverarbeitung e. V. bearbeitete im Rahmen des Projektes Bild-Robo innerhalb der Hauptkomponente „komplexe Informationsverarbeitung“ den Schwerpunkt der 3D-Positionserfassung von Roboter und Mensch. Diese Aufgabe stellte eine besondere Herausforderung dar. Es galt die relevanten Daten aus den unterschiedlichsten oftmals sehr komplexen Szenarien zuverlässig und in Echtzeit zu extrahieren und zu verarbeiten. Wechselnde Beleuchtungsverhältnisse, Spiegelungen, Schattenwurf, homogene Bildinhalte, ungünstige Farbverteilungen zwischen Hintergrund und Vordergrundobjekten sowie Verdeckungen erschweren die Bildanalyse und erfordern äußerst robuste Algorithmen und kombinierte Methoden.
Ergebnis dieser Arbeit ist das Tool Eye4Save, das eine 3D-Raumüberwachung in Echtzeit ermöglicht.
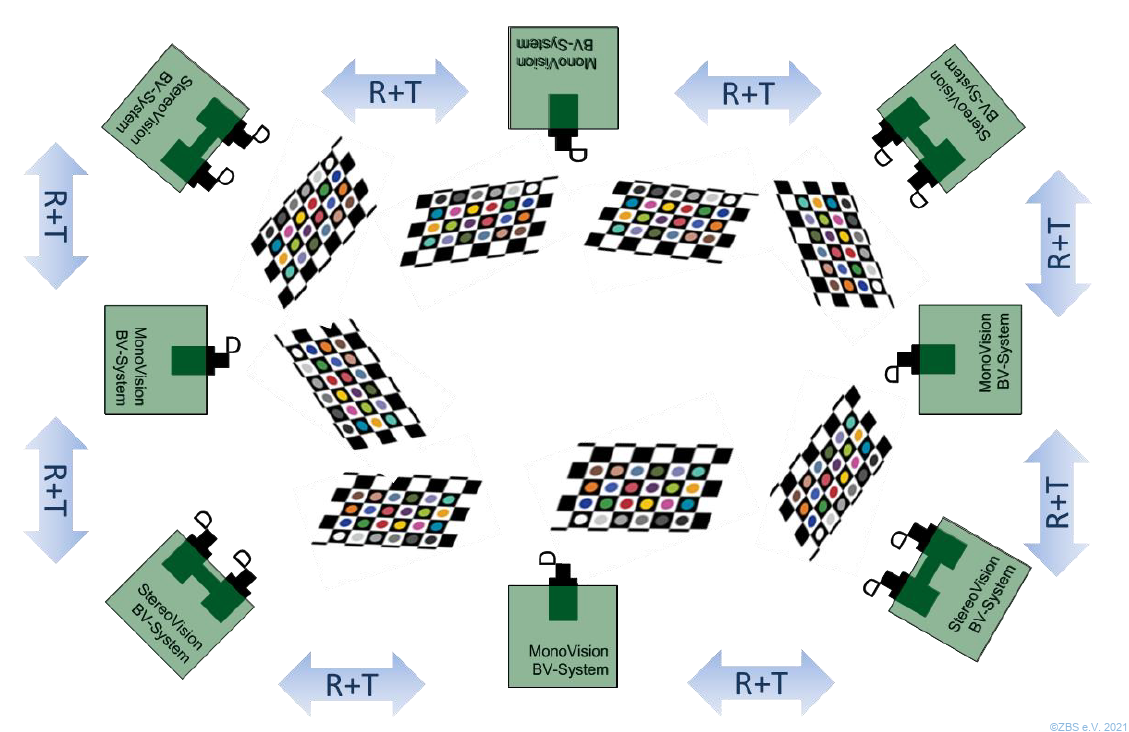
Stereo-Kamerdamodul zur Arbeitsraumüberwachung
Sukzessive extrinsische Kamerakalibrierung
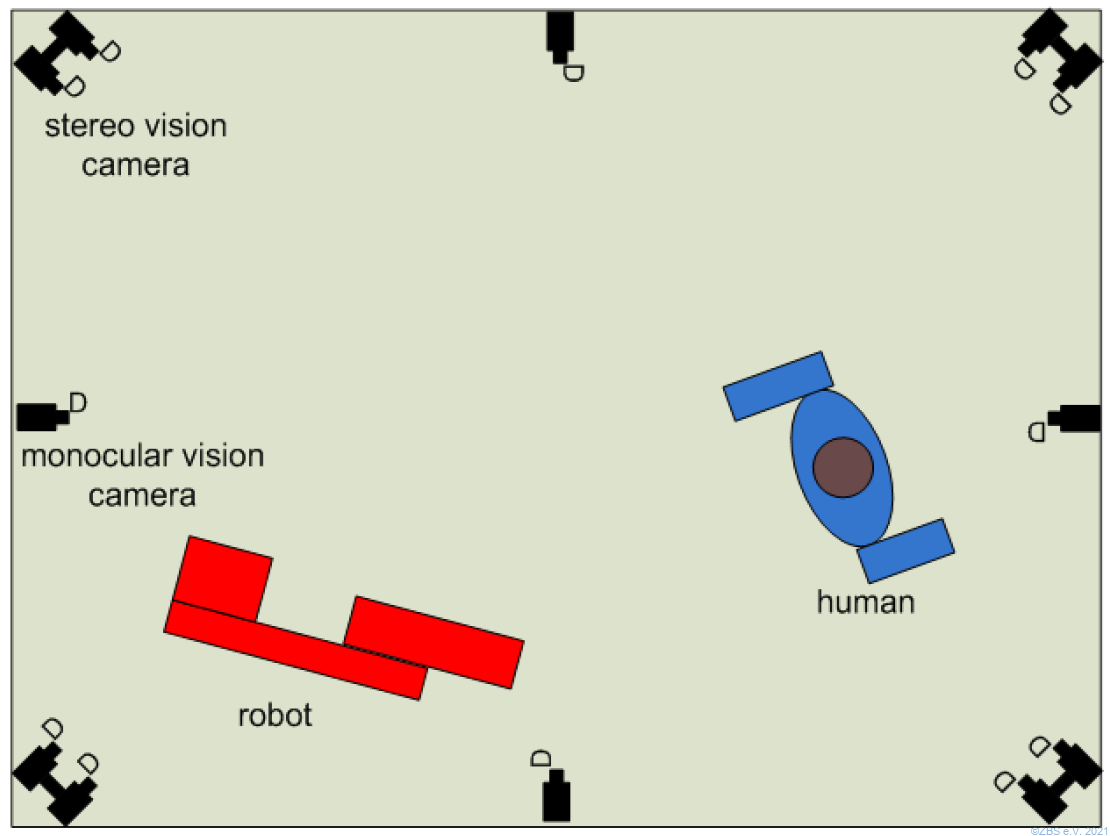
Szenario: Observation Mensch-Maschine-Arbeitsraum
Mensch-Maschine-Kooperation
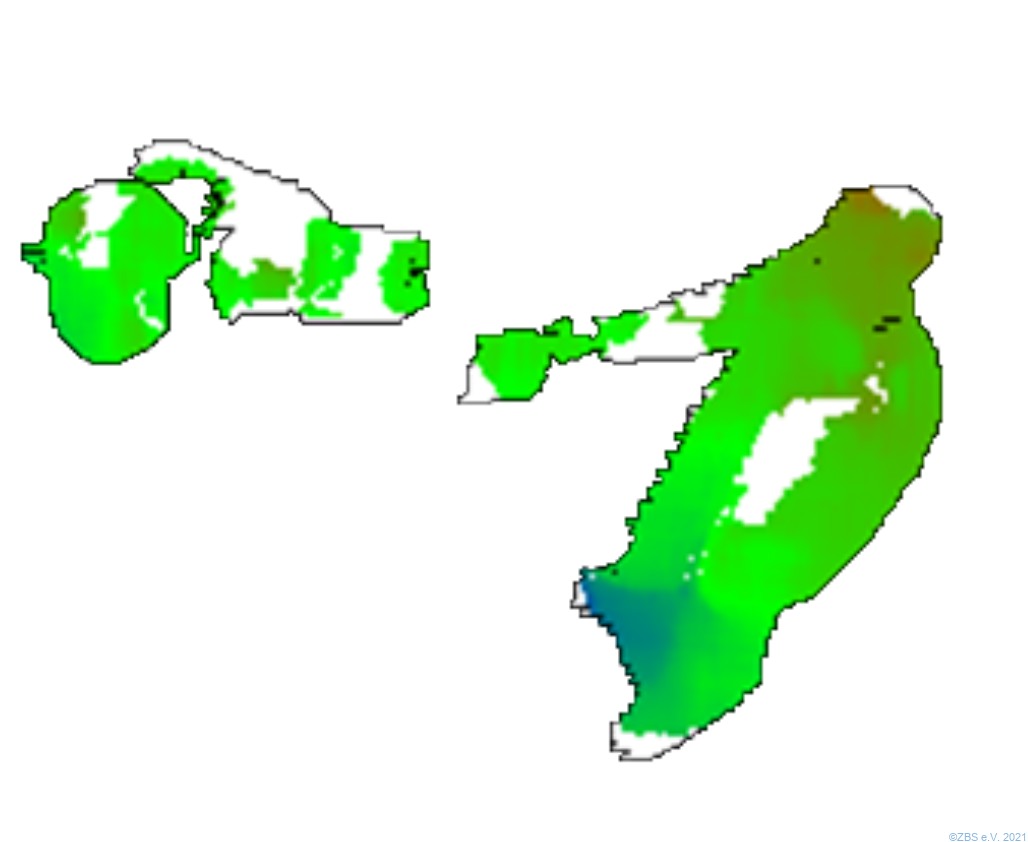
Distanz-farbcodierte Silhouette einer Kameraperspektive
3D-Voxelmodell der erfassten Szene
Eye4Save-Demonstrator im Teilprojekt „Sicherheitsrelevante Gesten für die Mensch-Roboter-Kooperation“ des Verbundprojektes „3D-Gesteninteraktion und Fusion von 3D-Bildern“ (GestFus) der Allianz 3Dsensation
Veröffentlichungen
Daniel Kapusi, Rainer Jahn, Rico Nestler und Karl-Heinz Franke: Eye4Save – visuelle 3D-Überwachung für die sichere Mensch-Maschine-Kooperation. 17. Anwendungsbezogener Workshop zur Erfassung, Modellierung, Verarbeitung und Auswertung von 3D-Daten „3D-NordOst“, GFaI Gesellschaft zur Förderung angewandter Informatik e. V. Berlin, S. 123-134, ISBN: 978-3-942709-13-2 .
Daniel Kapusi, Rico Nestler und Karl-Heinz Franke: Farbhistogrammgestützte 3D-Objektverfolgung in einem Mensch-Roboter-Überwachungsszenario. In: Tagungsband 20.Workshop Farbbildverarbeitung. German Color Group, September 2014. ISBN: 978-3-00-047016-5.
Rainer Jahn, Rico Nestler, Karl-Heinz Franke und Dorit Merhof: Color-Codebooks zur Vorder- und Hintergrundsegmentierung. In: Tagungsband 20.Workshop Farbbildverarbeitung. German Color Group, September 2014. ISBN: 978-3-00-047016-5.
Martin Krawetzke: Objektbeschreibungen für die 3D-Szenenanalyse am Beispiel einer kamerabasierten Überwachung von Roboterarbeitsplätzen. Masterarbeit, TU Ilmenau, März 2014. bearbeitet beim ZBS e. V.
Daniel Kapusi, Martin Klewer und Peter Pharow: Mehr Sicherheit für die industrielle Robotik. SPS-Magazin, Seiten 96 – 97, Mai 2013.
Daniel Kapusi, Philipp Prinke, Darko Vehar, Rainer Jahn, Karl-Heinz Franke und Rico Nestler: Simultaneous Geometric and Colorimetric Cameracalibration. In: Tagungsband 16. Workshop Farbbildverarbeitung. German Color Group, Oktober 2010. ISBN: 978-3-00-032504-5.
Daniel Kapusi, Philipp Prinke, Rainer Jahn, Karl-Heinz Franke und Rico Nestler: Geometric and Colorimetric Calibration For Multiview Camera Adjustments. In: IWK – 55th. International Scientific Colloquium. TU Ilmenau, September 2010. ISBN: 978-3-938843-53-6.